|
SERVO-300
|

|
| Servo-300 is a 3-axis, command-type, servo motor
control board. The embedded CPU of servo-300 performs the
motion command transferred from host-PC via a 2K bytes
FIFO. It also sends the position and status to host-PC
via another 2K bytes FIFO. This buffer provides time
buffer and it is very suitable for windows operating
system. This board provides DOS, windows 95 and windows
NT drivers. Ordering Information SERVO-300 : 3-Axis V-command Servo motor board Include : 9-pin D-sub connector x 2 Option DB-200 : 9-pin
and 25-pin Screw Terminal Board |
Features
|
| SERVO-300 is a microprocessor based and 3- axis V-command type Servo motor control board. It contains a 2Kbytes-FIFO to receive motion command from host PC, and it also sends the position and status to host-PC via the other 2K bytes FIFO. The motion profile is generated by microprocessor. This microprocessor also handles auto-protection function. Each Digital I/O supports 2500Vrms optical isolation. | 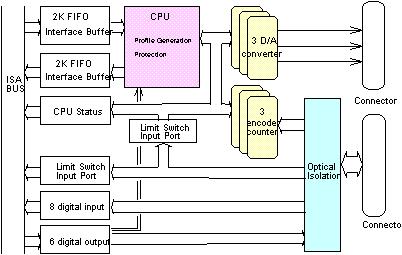 |
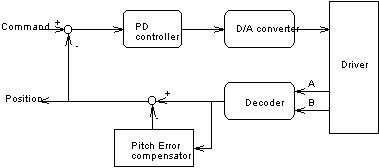
The Control System The sampling time is 2.2ms for 3-axis control system. The control loop includes a PD controller and a pitch error compensator. The gain parameter, Kp and Kd, of PD controller can be set from host PC. The pitch errors are recorded in a size 2500 table which can be set by user. The compensating pitch is 256 pulse, so the compensation range is 2500*256=640000 pulse. (about 800mm, if screw pitch=5mm, encoder=4000pulse/rev.). |
 |
Software DDA For precise control and adjustable speed, the Software DDA will divide the command into several equal delta commands. The maximum command is 2040 pulse, so the maximum speed is : 2040 / (0.0022*DDA) * 60 / ENCODER. For example, DDA=5, ENCODER=4000 pulse/rev. delta command = 2040/5 = 255 pulse Therefore it is very important to select a proper DDA
value to your system The Operating Mode For easily developing your system, SERVO-300 board provides three operating mode: simulation mode / open loop mode / close loop mode. Please refer to MSERVO3_SET_CONTROL_MODE() command. |
Simulation mode In simulation mode, the SERVO-300 board will simulate
the motion profile. This profile is generated by user's
motion commands and send the position back to host PC.
The servo board will not output V-command to control
motor. Open loop mode In open loop mode, user can directly output a constant
voltage to servo driver. The constant value can be set by
MSERVO3_CALV()
command. This mode can be used to tune the velocity loop
gain or to drive the inverter. Close loop mode In close loop mode, the servo board performs the PD controller. It also executes the following function. 1. Pitch error compensation
|